Geometry Queries(碰撞检测)--翻译
原文链接Geometry Queries.
前言
solid half-space:
我对solid half-space的理解是: 正常封闭型固体分成内部和外部,
half-space geometry表示外部与外界相交,
内部也能与外部相交的几何体.
例如平面就可以被当做solid half-space.
SPU和PPU是什么? 解释:PS3中的处理器核心.
序言
这篇文章介绍使用PhysX处理独立几何体的碰撞和形状查询.
碰撞和场景查询形成对比, 后者碰撞或者查询场景中所有的对象.
有四种主要的几何Geometry Query:
Raycasts(Raycast Queries): 射线是否与几何体相交Sweeps(Sweep Queries): 沿着直线移动一个几何体, 找到与之相交的几何体的第一个点Overlaps(Overlap Queries): 决定两个结合体怎么相交.- 渗入深度计算(
minimal translational distance queries, 缩写MTD): 查找能使两个Overlap的几何体分开的最小距离的方向.
另外,
PhysX提供一个Geometry Object的计算AABB的方法,
以及计算一个点到Geometry Object的距离.
以下所有函数中,
Geometry Object都是以PxGeometry structure定义形状,
以PxTransform structure定义姿势的.
所有的Transform和Vector都被解释为在任意空间,
并且返回该空间中的结果.
Raycasts
Raycast Query:沿着一条线段追踪一个点,
并记录与几何体表面相交的信息.
PhysX支持向所有几何体打射线.
下面的代码举例说明如何使用Raycast Query:
1 | PxRaycastHit hitInfo; |
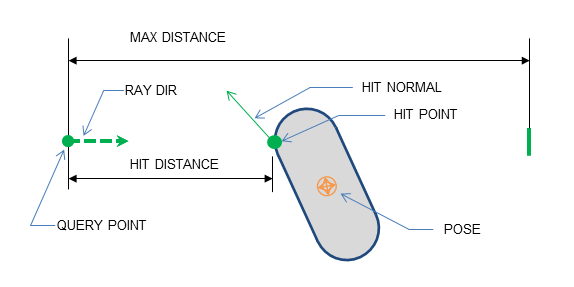
对参数的解释如下:
Origin: 射线起始位置.unitDir: 定义射线方向的单位向量.maxDist: 沿射线搜寻的最大距离.maxDist必须在\([0, inf]\)范围之内. 如果1maxDist为0, 只有当射线起始点在图形内部才会返回一个hit, 下面对每个几何体进行详细说明.geom: 被测试的几何体.pose: 被测试几何体的位置hitFlag: 指定查询应返回的值, 以及处理查询的选项.maxHits: 返回的最大hit数量.hitInfo: 指定射线结果存储的地方, 即PxRaycastHit结构体.anyHit: 已废弃. 它等价于PxHitFlag::eMESH_ANY. 应该使用PxHitFlag::eMESH_ANY.
返回结果为交互的数量. 每个交互的信息,
都会用PxRaycastHit存储. 结构体属性如下:
1 | PxRigidActor* actor; |
某些字段是可选的, flag字段指明哪些成员会被填充到结果中.
如果在输入中设置了相应的字段, 该字段将被填充到输出结构中. 例如,
如果hitFlags被设置成PxHitFlag::ePOSITION,
查询将会填充PxRaycastHit::position字段,
并且在PxRaycastHit::flags中填充PxRaycastHit::position值.
如果Input Flag中没有设置指定的成员,
输出结果中不一定会包含相应成员的数据.
如果输入中不包含eNormal和ePosition标记,
查询会更快.
对于那些最初不与几何体相交的射线, 字段填充如下(可选字段和控制它们的标记列在一起):
actor和shape不会被填充(这些字段只在scene-level raycast中被使用, 详情:Scene Queries).position (PxHitFlag::ePOSITION):相交的位置.normal (PxHitFlag::eNORMAL):交点的表面法线.distance (PxHitFlag::eDISTANCE): 射线上找到交点的距离.flag指明了结构体中哪些字段是可用的.faceIndex:射线hit到的face的index. 对于三角形网格(triangle mesh)和高度场(height field)相交, 它表示三角形索引. 对于凸多边形(convex mesh)相交, 它是多边形的索引. 对于其他形状, 它永远是0xFFFFFFFF.u和v(PxHitFlag::eUV)是交点的重心坐标系. 这些字段(以及标记)只支持mesh(不支持高度场(height field)).
Position字段和重心坐标系相关, 公式如下,
其中v0,
v1和v2是被hit的三角形的顶点.
position = (1 - u - v)v0 + uv1 + v*v2;
如何在triangle mesh中检索面和顶点数据,
在凸多边形mesh(convex mesh)和高度场(height field)中使用面和顶点索引,
详情请查询Geometry.
当射线起点在几何体内部时, 除了应用上面的行为,
对于某些字段PhysX可能无法计算出有意义的值. 这种情况下,
这些字段不会发生更改, 并且对应的标记也不会被设置.
具体细节因几何类型而异, 如下所述.
射线交点的具体情况如下:
向Spheres
Capsules Boxs
Convex Meshes打射线
当射线原点在固体对象(Spheres, Capsules
Boxs
Convex Meshes)内部时,最多返回一个结果:
PxHitFlag::eDISTANCE被设置, 并且distance为0.PxHitFlag::eNORMAL被设置, 并且交点法线方向与射线方向相反.PxHitFlag::ePOSITION被设置, 并且position (impact point)设置为射线原点.
如果射线的起点和终点与物体表面非常近,
它有可能被看做成surface的任何一边(side).
向平面打射线
对于射线检测,
会把平面当做只有半个空间(half-space)的固体,
(和overlap不同, 为什么不同?).
大多数情况下会返回一个结果, 如果射线原点在平面的后边,
即使射线和平面相交, 也不会有hit点.
如果射线的起始和结束点与平面非常接近, 它可能会被当做平面的任何一边.
向Triangle meshes打射线
把triangle meshes当做非常薄的三角形面而不是固体对象.
可以通过配置返回一个任意hit点,
或者很多个hit点.
- 如果
maxHits为1, 并且没有设置PxHitFlag::eMESH_ANY(或者anyHit为true), 查询将会返回最近的交点. - 如果
maxHits为1, 并设置了PxHitFlag::eMESH_ANY(并且anyHit为false), 查询将会返回任意hit点. 对于line of sight或者shadow ray而言, 使用它就可以完全可以知道射线是否hit到mesh. - 如果如果
maxHit大于1, 查询将会返回多个交点, 最多为maxHits个. 如果交点个数超过maxHits, 无法保证结果中包含最近的hit. 使用示例: 击中多个三角行的穿墙(wall-piercing)子弹, 或者要求特定的过滤. 注意, 在这些例子中必须使用PxHitFlag::eMESH_MULTIPLE. 还要注意如果hit点彼此非常接近,SDK默认返回第一个found到的hit结果.
|
通常any hit 比closest hit
更快, closest hit 比multiple hits更快, 即:any
hit 快于closest hit 快于multiple hits.
|
默认情况下, 背面hits(back face hits,
三角形外向法线和射线的点乘(dot)结果为负)会被剔除,
所以对于任何命中上述法线的三角形, 与射线方向的点乘结果都为负
如果三角形正面法线(outward-face-normal)与射线的点乘为负,
则hit点被剔除.
- 如果
PxMeshGeometryFlag::eDOUBLE_SIDED或者PxHitFlag::eMESH_BOTH_SIDES被设置, 则禁止剔除. - 如果
PxMeshGeometryFlag::eDOUBLE_SIDED被设置,back face hit将会把最终结果的法线反转.
这句话太难翻译直接贴原文了(reported-normal不知道怎么翻译):
For example a transparent glass window could be modeled as a double-sided mesh, so that a ray would hit either side with the reported normal facing opposite to the ray direction. A raycast tracing the path of a bullet that may penetrate the front side of a mesh and emerge from the back could use eMESH_BOTH_SIDES to find both front and back facing triangles even when the mesh is single-sided.
例如一个类型为
double-sided mesh的玻璃窗, so that a ray would hit either side with the reported normal facing opposite to the ray direction. 有些子弹可以击穿mesh, 模拟这类子弹路径的射线, 可以使用eMESH_BOTH_SIDES来找正面和背面的三角形, 即使该mesh是single-side.
下图展示了当单一射线和一个mesh在几个不同的地方相交时,
不同flag会发生什么.
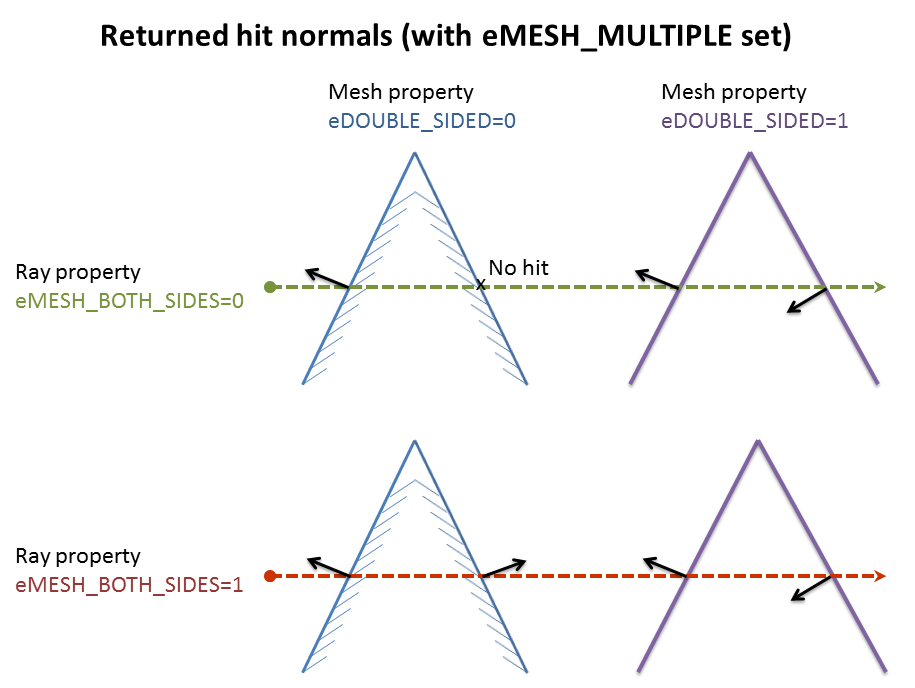
只针对某些mesh使用PxHitFlag::eMESH_BOTH_SIDES标志位,
并且该flag在PxQueryFilterCallback中设置.
如果射线开始和结束的点和三角面非常接近, 可能会被当成三角形的任何一边(正面/背面).
向Heightfields打射线
- 处理
Heightfields和triangle meshes不同,heightfields会一直被当做double side, 意味着无论射线原点在heightfileds surface的上面或者下面, 最终的hits都会被注册. hit normal一直是triangle hit的法线, 当thickness\(<=\) 0, 朝向(在heightfields空间)\(+y\)方向; 当thickness大于0, 朝向(在heightfields空间)\(-y\)方向.- 除了上述情况,
heightfields thickness对其他方面没有任何影响. 特殊的, 固体的heightfield部分不会生成hit. - 当射线
hitheightfield时候,UVs不会被设置,PxHitFlag::eUV标记也不会被设置.
overlap

overlap查询只是简单的查询两个几何体是否重叠了.
其中一个几何体必须是box,sphere,capsule或者凸多边形,
另一个几何体可以使任意类型.
下面代码说明了如何使用overlap查询:
1 | bool isOverlapping = overlap(geom0, pose0, geom1, pose1); |
overlap不支持hit flag,
只是返回一个bool类型的结果.
- 平面被当做
solid half-space: 任何处于平面下的都被当做volume的一部分. triangle mesh被当做非常薄的三角形表面, 而不是固体对象.heightfield被当做由其厚度挤压成的三角形表面.overlap几何体不会与heightfield相交, 但是挤压空间将会上报hit
如果对于triagnle mesh和heightfield类型不仅仅需要一个bool结果,
使用PxMeshQuery
API.
Penetration Depth
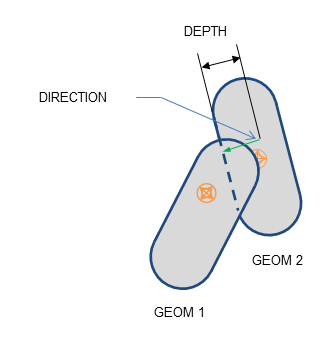
当两个对象相交,
PhysX能够计算通过平移将二者分开的最小距离和方向(分开的量涉及到MTD,
即: 最小平移距离(minimum translational distance),
通过平移将二者分开的长度最小的向量).
其中一个几何体必须是box, sphere,
capsule, 或者convex mesh,
另一个可以是任意类型.
如下代码阐述了如何使用penetration depth的查询:
1 | bool isPenetrating = PxGeometryQuery::computePenetration(direction, depth, |
参数解释如下:
direction: 第一个对象通过平移从第二个对象中脱离(depenetrate)出来的方向.distance: 第一个对象从第二个对象中脱离(depenetrate)出来的距离.geom0: 第一个几何体.pos0: 第一个几何体的transform.geom1:第二个几何体.pos1: 第二个几个题的transform.
如果对象有渗入, 则返回true, 这种情况下,
会设置其方向和深度字段. 通过平移向量(\(\vec{D}=\vec{Direction}*depth\))将二者分离开来.
如果函数返回true, depth一定\(>=0\).
如果几何体没有overlap, 函数返回false,
direction和depth都不会进行设置.
对于简单(convex)的形状, 返回结果是精确的.
对于mesh和heightfields,
在PxExtensions中, 将使用的循环算法和专用函数暴露出来了.
1 | PxVec3 direction = PxComputeMeshPenetration(maxIter, |
这里, maxIter是算法的最大循环次数,
并且nb是真正的循环执行数量,
并且作为output变量输出出来.
如果检测没有overlap, nb将会被设置成0.
代码尝试至多maxIter此循环,
但是如果找到depenetration向量, 可能会提前返回. 通常,
maxIter = 4就会得出一个不错的结果.
这些函数只会计算出一个近似的depenetration向量,
当在几何体和mesh/heightfield之间的overlap数量比较小的时候,
会工作良好. 特别的, 当对象中心在三角形背面时, 将会忽略与三角形的交互.
如果所有相交的三角形都符合上述条件,
该函数将不会计算MTD向量.
Sweeps
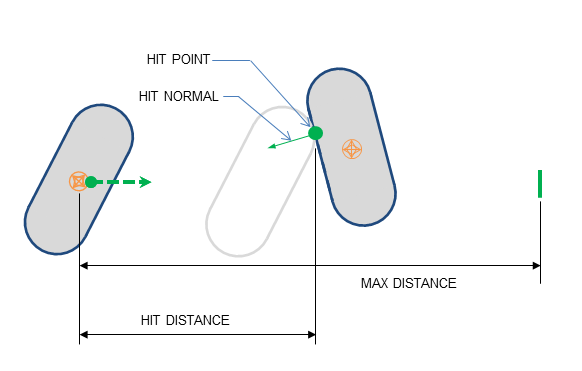
sweep query追踪一个对象横穿空间的过程,
并找到在这个过程中与第二个几何体碰撞的点. 并且上报关于碰撞点的信息.
PhysX只支持第一个对象(贯穿空间的那个对象)为sphere,
box, capsule, 或者convex几何体,
第二个对象可以是任何类型.
下面的代码举例说明如何使用sweep query:
1 | PxSweepHit hitInfo; |
这些参数解释如下:
unitDir: 定义sweep的单位向量.maxDist: 定义了沿着sweep查询的最大距离. 它必须在\([0, inf)\)之间, 并且通过SDK会被限制在PX_MAX_SWEEP_DISTANCE之内. 当sweep距离为0时, 等价于overlap检测.geomToSweep: 将要sweep的几何体, 支持box,sphere,capsule, 或者convex mesh类型.PosToSweep: 用于sweep几何体的初始位置.geomSweptAgainst:sweep against的几何体.hitInfo: 最终返回的结果. 一个sweep最多返回一个hit.hitFlags: 决定sweep将被如何处理, 如果发现impact点, 会返回对应的数据.inflation: 以对象表面向外扩展的方式膨胀第一个几何体, 并将所有角都做成圆角. 当使用sweep来测试movement是否可用时, 它用来保证几何体最小的空间边界.
正如射线检测一样,
如果某个flag在hitFlags中设置,
在输出结构体对应的字段会被填充. PxSweepHit的字段如下:
1 | PxRigidActor* actor; |
actor和shape:actor和shape不会被设置(这些字段只有在scene-level sweep中才会被使用, 详见: Scene Queries).position(PxHitFlag::ePOSITION): 交点的位置. 当有多个impact点时, 例如两个box, 面和面相撞,physX将任意选择一个点. 针对meshes或者height fields类型, 使用函数PxMeshQuery获取详细信息.normal(PxHitFlag::eNORMAL):impact点的表面法线. 他是一个单位向量, 指向被击中对象的外侧, 与sweep方向相反(即:sweep方向和impact法线的点乘是负数.).distance(PxHitFlag::eDISTANCE):沿着射线方向, 物体与碰撞点的距离.flag: 指定结构体的哪些字段是可用的.faceIndex:sweep hit的面索引. 这个是被击中对象的面, 而不是sweep对象. 对于和triangle mesh和heightfield的sweep交点, 它是三角形顶点索引, 与convex mesh的交点, 它是多边形顶点索引. 对于其他类型, 它是0xffffffff.
当sweep
hit到triangle mesh或者convex mesh,
返回的被选择的三角形如下:
- 对于
convex和boxsweep, 选择距离最短的三角形. - 对于
capsule和sphere, 最短距离的三角形不一定会被选择, 最短距离在\(10^{-3}f(即1e-3f)\)范围内的都会被考虑, 选择法线(三角形的法线)方向与sweep方向几乎一致的三角形. 如果这些三角形法线相同, 会随机选择他们中的一个然后返回.
这些例子中, hit点, 位置(例如两个box的面和面sweep会随机选择其中一个点),
法线(对于capsule和sphere,
最短距离的三角形不一定会被选择, 最短距离在\(10^{-3}f(即1e-3f)\)范围内的都会被考虑,
选择法线(三角形的法线)方向与sweep方向几乎一致的三角形.
如果这些三角形法线相同,
会随机选择他们中的一个然后返回.),都会影响最终选择哪个三角形.
与raycast不同, sweep不支持u,
v坐标.
对于几何对象的sweep against:
- 平面被当做半个空间的固体,
也就是说任何在平面后面的物体多会被当做
volume的一部分进行sweep against. - 相同的背面剔除规则(应用在
raycast上的)也会应用到sweep上, 需要注意的是, 不支持eMESH_MULTIPLE和eMESH_BOTH_SIDES.
Initial Overlaps
和射线检测相似, 开始就在对象内部,
两个几何体sweep时候可能就已经相交了. 默认情况下,
PhysX会检测并上报overlap.
使用PxSweepHit::hadInitialOverlap()来查看hit是否是initial overlap生成的.
对于triangle mesh和height field,
背面剔除在overlap check之前执行,
因为如果triangle被剔除了,
就不会上报overlap事件了.
PhysX是否计算MTD由PxHitFlag::eMTD决定.
如果PxHitFlag::eMTD没有被设置:
distance将被设置成0,PxHitFlag::eDISTANCE也会在PxSweepHit结构体中设置.normal和sweep方向相反, 并且在结果PxSweepHit中PxHitFlag::eNORMAL会被设置.position不会被定义, 并且在结果PxSweepHit中PxHitFlag::ePOSITION不会被设置.faceIndex是第二个几何对象的面. 对于heightfield和triangle mesh, 他是第一个被发现的overlap triangle的索引. 对于其他几何类型, 将设置为0xffffffff.
如果PxHitFlag::eMTD被设置,
hit结果的定义如下:
distance被设置成penetrate的深度,PxSweepHit中的PxHitFlag::eDISTANCE被设置.normal被设置成penetrate的方向,PxSweepHit中的PxHitFlag::eNORMAL被设置.position为sweep几何对象上的一个点(即:第一个几何对象参数), 并且PxSweepHit中的PxHitFlag::ePOSITION会被设置.faceIndex是第二个几何对象上的面.- 对于
convex mesh, 它是最小penetrate的面. 如果MTD可以通过edge或者convex顶点分离对象, 将选择法线(面的法线)最接近分开方向的面. - 对于
triangle mesh和heightfield, 它是在depenetration算法最后一次循环中查找到的最后一个penetrate三角形. - 对于其他几何类型,
faceIndex将会被设置成0xffffffff.
- 对于
在initial overlap中, 这个标志将会带来额外负担的处理操作.
另外, 会启用如下限制:
PxHitFlag::eMTD与PxHitFlag::ePRECISE_SWEEP和PxHitFlag::eASSUME_NO_INITIAL_OVERLAP(见下文)不兼容.PxHitFlag::eMTD与他们中的任何一个组合使用都会报错, 并且与PxHitFlag::eMTD不兼容的标志将被忽略.- 在
PS3中,PxHitFlag::eMTD不支持SPU(Power Processing Element) sweep. 如果在SPU sweep中包含了PxHitFlag::eMTD, 将会报错.PPU(Synergistic Processing Elements)完全支持PxHitFlag::eMTD.
有时使用定制的代码路径测试initial overlap会带来性能消耗.
有必要保证几何对象不是initially overlapping,
overlap支持使用PxHitFlag::eASSUME_NO_INITIAL_OVERLAP进行检测.
有一些使用该flag的限制, 详见:Pitfalls.
- 当
initial overlap几何体处理未定义行为时, 会使用PxHitFlag::eASSUME_NO_INITIAL_OVERLAP标志. PxHitFlag::eASSUME_NO_INITIAL_OVERLAP与zero sweep distance组合使用会导致warning和undefined behavior.
|
注意: 具有PxHitFlag::eMTD flag的sweep使用两种针对三角形的背面剔除. 首先, 在Sweep方向上被剔除的三角形决定这是否是一个overlap. 如果检测到overlap, 他们会进一步检测centroid(面心)是否在三角形后面, 如果没找到三角形, direction将设置为sweep diection的反方向, distance设置为0. |
|
注意: 大多数情况下, 将第一个几何体平移-normal*distance距离, 会将对象分开. 尽管可以使用循环depenetration算法找到triangle mesh和height field的MTD, 但是有些情况下MTD可能不会将mesh完全分离开. 这种情况下, 在应用平移后, 要调用第二次查询. |
|
注意: 在PhysX 3.3中一个已知的问题是当eMTD没有设置时, sweep against convex mesh的face index是undefined |
Precise Sweeps
PxHitFlag::ePRECISE_SWEEP允许更加精确的sweep代码(默认情况下使用更快的但是精度不高的解决方案).
PxHitFlag::ePRECISE_SWEEP和inflation和PxHitFlag::eMTD不兼容.
Sweeps against Height Fields
Height field被当做很薄的三角形面, 而不是固体对象.- 厚度不会影响
initial overlap检测和点的碰撞. - 对于
single height field, 如果厚度小于0,hit的法线方向为本地坐标系中的+Y方向, 如果厚度大于0,hit的法线方向为本地坐标系中的-Y方向. - 如果设置了
eDOUBLE_SIDED或者eMESH_BOTH_SIDES,height field将被认为是双面的.- 返回的
hit会一直朝向sweep方向.
- 返回的
eMESH_ANY不起作用.ePRECISE_SWEEP不起作用.
Pitfalls
在使用sweep时候需要注意一些隐患:
- 由于精度问题, 当两个对象有非常巨大的大小差异, 会返回错误的结果.
- 由于算法不同,
sweep query可能不仅仅检测到一个overlap查询, 而是会检测一个不同的overlapping形状的初始化集合. 执行一个overlap check还不足以判定PxHitFlag::eIGNORE_INITIAL_OVERLAP标志位的安全性, 需要一系列的overlap/sweep/penetration depth信息的应用程序应该使用带有initial overlap testing和PxHitFlag::eMTD标志的sweep check.
Additional PxGeometryQuery functions
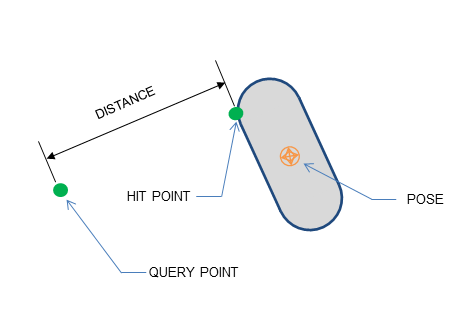
下面的函数计算点和几何体之间的距离. 只支持box,
sphere,
capsule和convex shape.
1 | PxReal dist = PxGeometryQuery::pointDistance(point, geom, pose, closestPoint); |
closestPoint是一个可选地输出参数, 它返回最近的点.
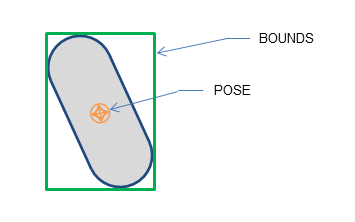
下面的函数计算几何体轴对齐的包围盒(AABB),
并返回它的姿态.
1 | PxBounds3 bounds = PxGeometryQuery::getWorldBounds(geom, pose, inflation); |
AABB包围盒被inflation缩放,
如果没有显式指定, 它的值为`1.01f.
PxMeshQuery
对于triangle mesh, height field overlap,
以及对triangle数组的sweep,
PhysX提供额外的函数可以获得多个结果.
只有boxes, spheres,
capsules与mesh或heightFields被测试的时候使用这些函数.
Mesh Overlaps
下面的代码举例说明了如何处理mesh triangle与给定球状体积:
1 | PxU32 triangleIndexBuffer[bufferSize]; |
findOverlapTriangleMesh函数用于额外提取三角形索引.
sphereGeom和spherePose指定overlap的区域.meshGeom和meshPose指定mesh和它的姿态.triangleIndexBuffer和triangleSize指定buffer以及buffer的大小.- 当
buffer溢出时,startIndex用于重新启动查询. 在这里例子中, 为了查询更多的三角形集合, 将该参数设置为目前已检索的数量. - 当查询的结果超过
buffer的大小, 会设置bufferOverflowOccured标志位.
height field也存在类似的查询函数.
Sweeps against Triangles
有时候, 例如, 当使用mesh overlap API时,
它会很方便的与一组三角形进行sweep. 为此,
PhysX提供指定的函数. 函数签名如下:
1 | bool sweep(const PxVec3& unitDir, |
参数解释如下:
unitDir,distance,geom和pose与PxGeometryQuery::sweep()函数头四个参数一样.distance的范围限制在PX_MAX_SWEEP_DISTANCE之内.triangleCount为包含在buffer中的三角形数量.triangles为三角形的buffer.hitFlags指定输出所需信息.cachedIndex, 如果设置了, 则该值表示第一个测试的三角形索引. 当重复的与三角形集合sweep时, 它非常有用.inflation与函数PxGeometryQuery::sweep()中的inflation参数一致.doubleSided表示输入的三角形是否为double-side. 它和PxMeshGeometryFlag::eDOUBLE_SIDED标志是等价的. 它支持背面剔除, 对于任何hit, 返回的面法线与sweep方向相反(详见:Raycasts against Triangle Meshes).
与其他查询相比, 该函数有额外的限制:
- 几何体类型必须是
sphere,capsule或者box. 不支持convex几何体. - 该函数返回单一
hit. 不支持multiple hits(尤其是PxHitFlag::eMESH_MULTIPLE). - 该函数总是返回最近的点.
- 只支持
PxHitFlag::eASSUME_NO_INITIAL_OVERLAP,PxHitFlag::ePRECISE_SWEEP和PxHitFlag::eMESH_BOTH_SIDES. - 在返回的
PxSweepHit结构体中, 不会设置有效标志位(PxHitFlag::ePOSITION,PxHitFlag::eNORMAL,PxHitFlag::eDISTANCE,PxHitFlag::eUV)